QRO UAV mission : Bridge inspection test created on March 11,
2070 - JLN Labs - Last update
March 12, 2007 Toutes les
informations et schémas sont publiés gratuitement ( Open
Source) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (Open Source) and are
intended for a private use and a non commercial use.
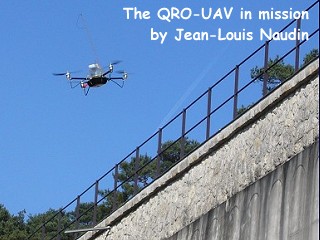
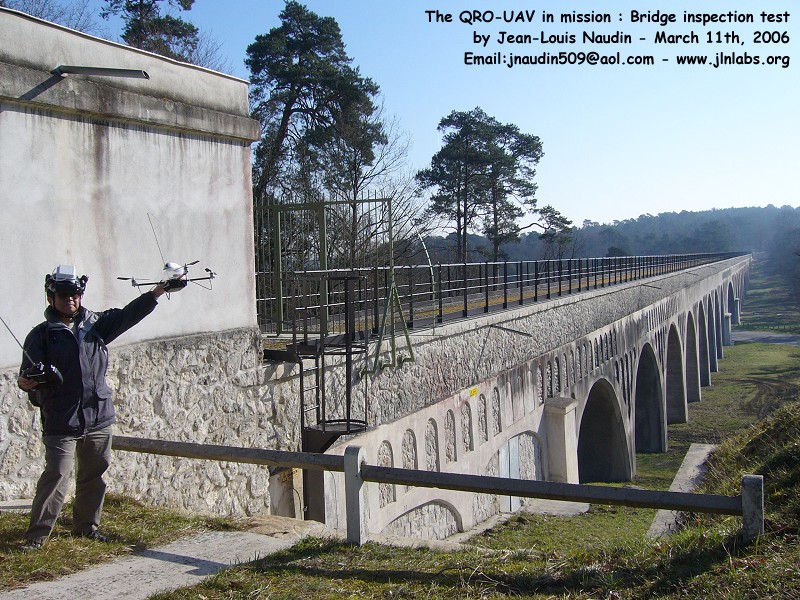
A 2.4
GHz high resolution CPcam Sony CCD video camera (500x582) is
mounted on my QRO v3.0. The video is sent to my HID (Helmet
Integrated Display) equiped with High Resolution LCD glasses
fixed on the helmet (see the HID test). The QRO-UAV is now ready
to do UAV missions, so, I have decided to conduct a serie of
missions in real situations with my QRO-UAV.
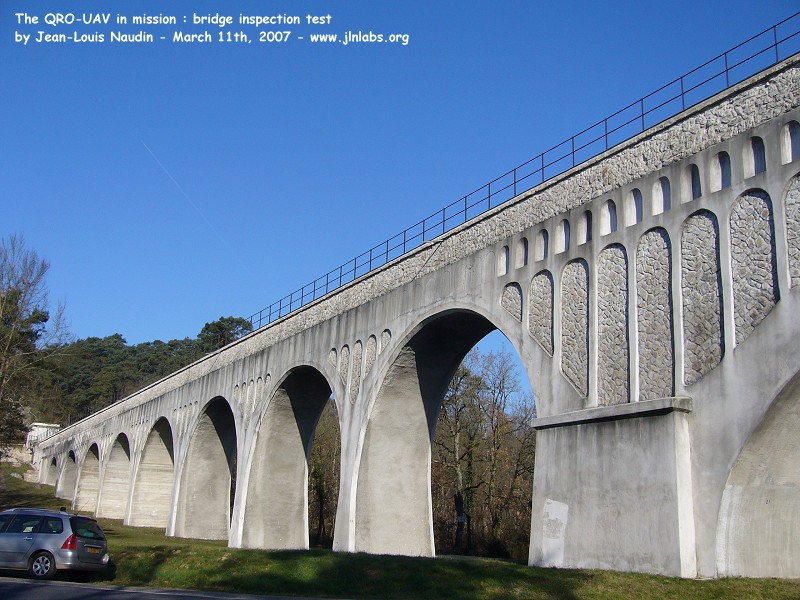
The 1st test mission of the QRO-UAV : A
close inspection of a big aqueduct.
Below, some photos extracted from the real
time video sent to my HID...
Tests
results :
The QRO v3.0 is easily manoeuvrable and very stable in spite of
the turbulences induced near the bridge. The QRO-UAV can be
positionned precisely and when the GPS board will be installed,
it will be able to lock on a geographic position. I have done 3
flights on the aqueduct successfully on March 11th, 2007.