Full HID training flights with a RP-UAV created on March 4th,
2007 - JLN Labs - Last update
March 4th, 2007 Toutes les
informations et schémas sont publiés gratuitement ( Open
Source) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (Open Source) and are
intended for a private use and a non commercial use.
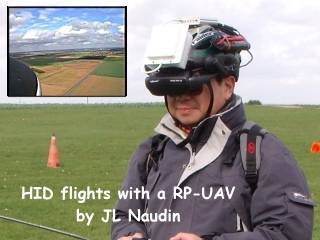
The
purpose of these serie of tests is to train myself to perform
full flights (from the take-off to the full landing) with a
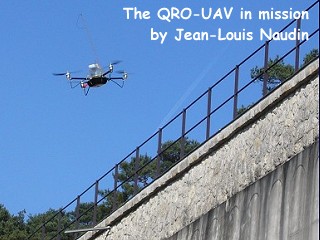
RP-UAV. The HID setup will be soon used for the Quad Rotor
Observer (QRO).
A 2.4
Ghz high resolution CPcam Sony CCD video camera (500x582) is
mounted on my electric powered RP-UAV. The video is sent to my
HID (Helmet Integrated Display) equiped with High Resolution LCD
glasses fixed on the helmet. The RP-UAV is self-stabilised with a
high performance auto-pilot and it is fully capable of self
landing procedures. Today, I have done successfully a lot of
flights with a such HID setup in various weather conditions :
winds up to 30 Km/h gusting at 40 Km/h, cross wind landings,
foggy weather...
See
below by yourself a video sample of a full HID flights with my
RP-UAV....
This
is a really exciting experience, the HID flights are nearly close
to a flight of a real plane. The auto-pilot is a very helpfull
tool for accurate and secure flights. The self-landing capability
of the RP-UAV in various weather conditions (strong wind, cross
wind, gusts, fog...) is really impressive...