RP-UAV missions 7 : High Altitude survey with GPS created on March 15,
2070 - JLN Labs - Last update
March 19, 2007 Toutes les
informations et schémas sont publiés gratuitement ( Open
Source) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (Open Source) and are
intended for a private use and a non commercial use.
The
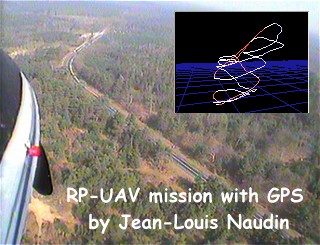
purpose of this 7th mission is to conduct a high altitude flight
with the RP-UAV equiped with a GPS board, an autopilot and a
video camera. The RP-UAV can be easily used for survey mission
for tracking events.
The 7th test mission of the RP-UAV is : High
Altitude survey with GPS.
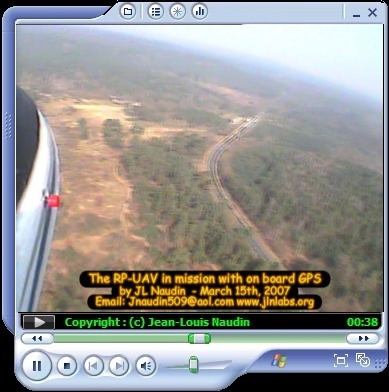
Below, some photos extracted from the real
time video sent to my HID...
Below
the GPS datas about the flight path of the RP-UAV
Above, the altitude Vs
the time of the RP-UAV during its flight mission.
Above,
the flight datas of the RP-UAV in 3D from the GPS, click on the
picture to see the 3D path animation
Tests
results :
In this simulation of survey mission, the RP-UAV has demonstrated
a great flight stability on the roll and pitch axis due to use of
the auto-pilot. The GPS board has been used in passive mode and
not linked to the controller board. The GPS accuracy during this
flight mission was 6 meters. In future missions, the GPS control
boad will be able to pilot itself the RP-UAV by controlling the
yaw axis and the throttle for a full automonous flight and an
altitude hold. The GPS board will soon be installed on the
QRO-UAV.