ATH v2.3 ( Affichage
Tête Haute ) created on May 25, 2007
- JLN Labs - Last update June
5, 2007 Toutes les
informations et schémas sont publiés gratuitement ( Open
Source) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (Open Source) and are
intended for a private use and a non commercial use.
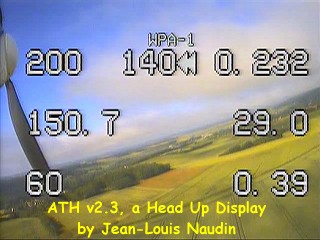
The ATH ( Afficheur Tête Haute ) or HUD (
Head Up Display ) is one of the most important tool for the UAV
pilot. The ATH system can be fully integrated in the pilot helmet
or in the ground station. On the ATH, the GPS datas about the UAV
flight are displayed in real time on the video sent by the on
board camera. With the help of the ATH system, the UAV pilot is
fully able to check the flight plan and/or to steer the UAV in
flight. You will find below the ATH v2.3 currently under test in
real UAV flights. This new version have been significantly
improved compared to the previous version v2.1.
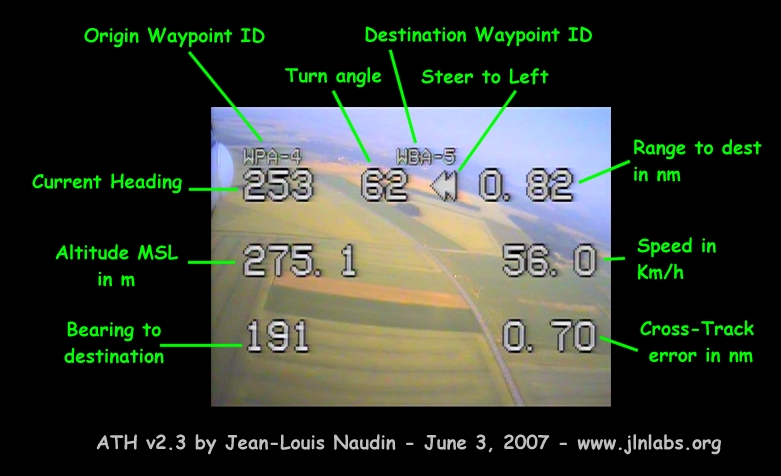
In this
new version 2.3, I have added some improvements and features :
- The
frames rate of the GPS datas have been increased to the max
frames rate defined by the NMEA 0183 v3.0 protocol,
- the bearing to destination heading and the Cross-Track
error have been added on the bottom line,
- the firmware code have been optimized and reduced in size.
Below, a sample of a GPS
track-log done with the help of ATH v2.3 ( Wind ~ 10
Km/h )
Comments : I have already done a lot
of training nav in real flight conditions with my ATH v2.3 and
its works very well at this GPS data frames rate. The next step,
currently under developpement and tests, is a full and integrated
auto-pilot (with a telemetry to the ground station) which will be
able to steer the UAV according to the flight plan stored in the
onboard computer...